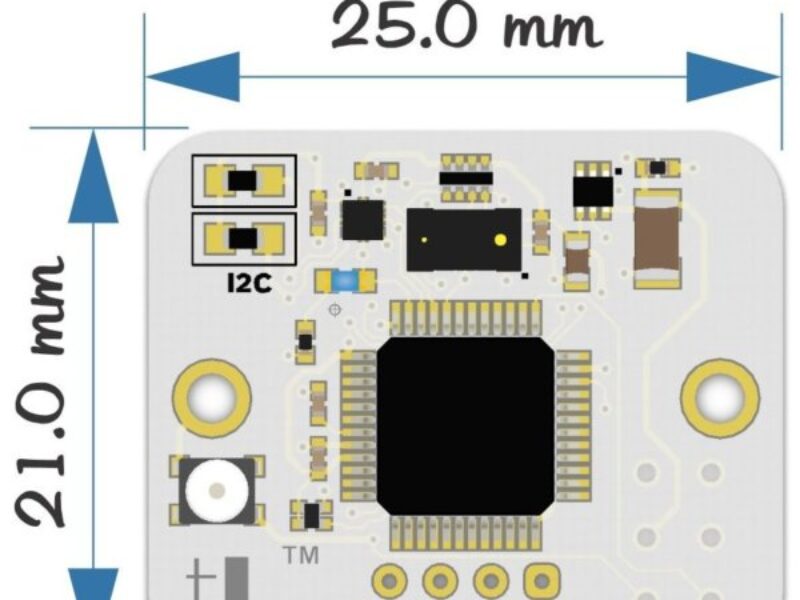
LiDAR board is only 25x21x8mm
To make LiDAR adoption simpler by the makers community, they interfaced the VL53L0 to a dedicated ultra-low-power 32-bit microcontroller used to abstract ST’s official and complex API into simple I2C commands that could be run from any from any host.
By writing a custom operating system on a dedicated MCU to translate all of the tough tasks into simple I2C commands, Bhatia and his team removed for others the burden of coding complex real-time instructions for controlling the VL53L0X ToF sensor.
So unlike other generic VL53L0X sensor boards, tinyLiDAR allows even low level controller boards like the Arduino Uno to run the sensor at full performance, without using any dedicated sensor libraries.
As an example, a distance reading sketch on the Arduino Uno using tinyLiDAR takes only 2604 bytes of program storage space vs 6480 bytes using the Pololu VL53L0X library with a generic VL53L0X sensor board. Also, this same sketch will need only 252 bytes of dynamic (RAM) memory using tinyLiDAR vs 414 bytes with library+generic board solution.
While being half the size of the PING))) ultrasonic sensor, each sensor is calibrated after assembly of the board so it can run distance sensing tasks up to about 2 meters (calibration data is stored in non-volatile storage).
TinyLidar – https://microed.co/tinylidar/
Check out the Indiegogo campaign
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :